Project Summary
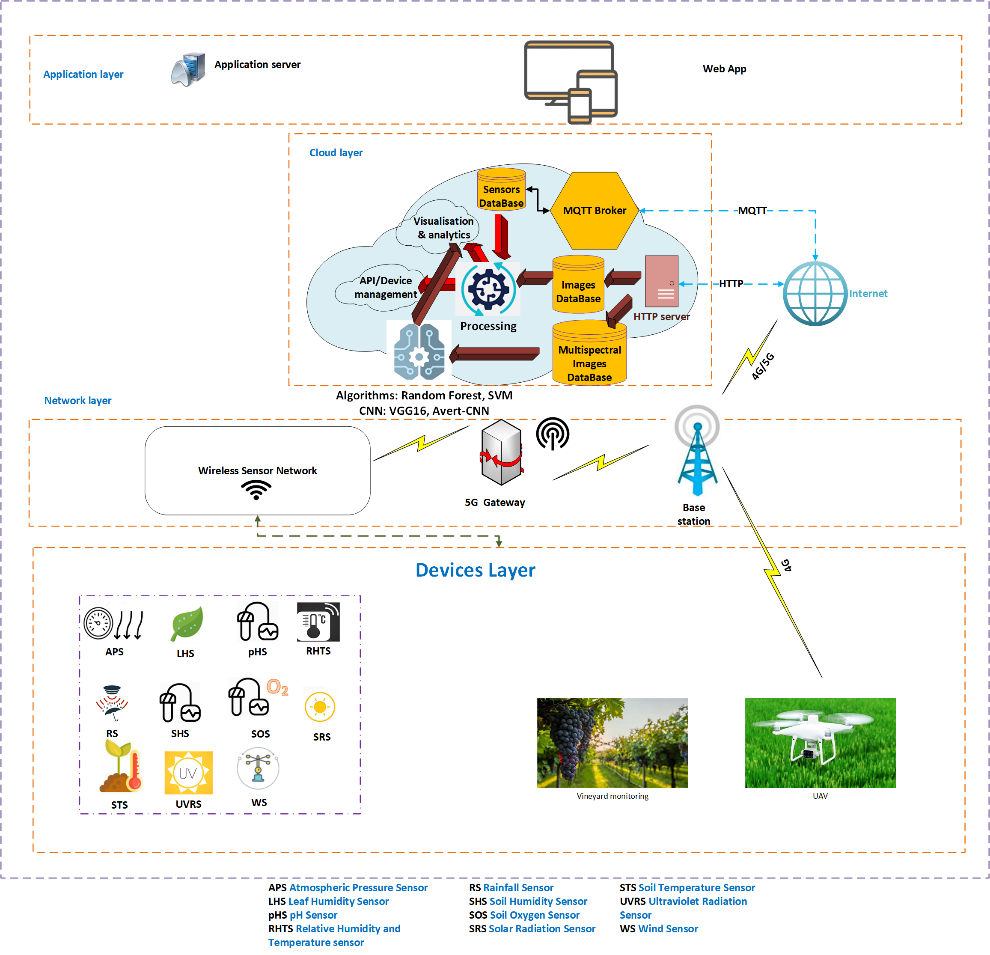
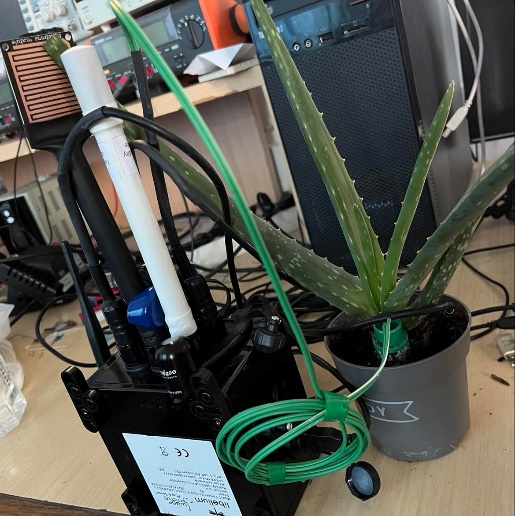
Within the NGI-UAV-AGRO project, a monitoring and prevention platform for precision agriculture was developed and optimized, a platform that functions using NGI 5G (Next Generation Internet) principles. The platform consists of an autonomous UAV (Unmanned Aerial Vehicle) DJI Phantom 4 Multispectral, a wireless dedicated sensor network, a Libelium Waspmote Plug & Sense device! Smart Agriculture PRO, as well as other hardware and software components that ensure its correct operation and reliability. Grapevine crops were real-time monitored, detecting changes in soil and crop parameters to automatically activate the soil irrigation mechanisms and identify the stages of certain diseases (black rot, downy mildew, and powdery mildew (flourishing)) that can occur due to air pollution, insufficient or excess precipitation, etc. Based on sensor’s data merging, phenological calendars and effective treatment recommendations were issued to the beneficiaries. Deep Leaning (DL) algorithms were used to perform predictability on diseases occurrence.
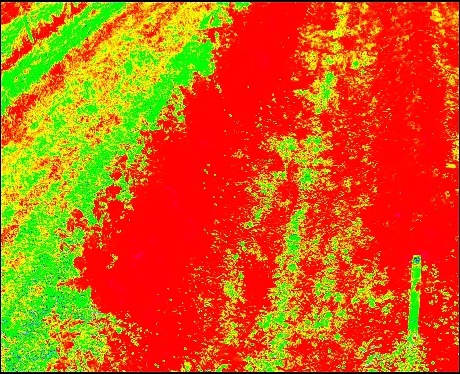
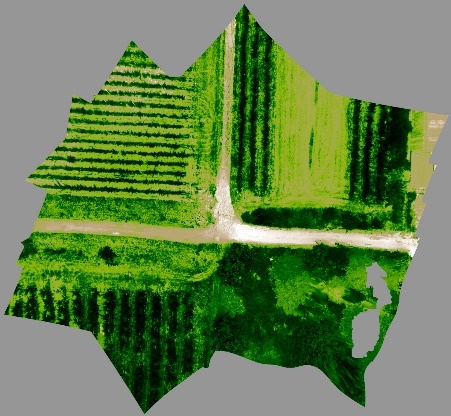
Using the DJI Phantom 4 Multispectral drone, flights were made to collect multispectral images based on which coverage maps were made. The generation of these maps is useful to easily identify the areas of the vineyard where there is viable crop (green vegetation) and where there is no viable crop (area covered with other plants not of interest for monitoring or weeds). Based on ODM (Open Drone Map) specialized software, the initial processing of the orthophotos was performed using the WebODM interface, achieving thus a single image that shows the entire area covered by the drone’s mission, an image called an image mosaic (Orthomosaic). Next, to obtain information about the health of the vegetation/crop in the monitored area, the normalized differentiation of vegetation index (NDVI) was used: the value 1 represents the maximum degree of vegetative consistency, while the value -1 represents areas completely devoid of vegetation. The value 0 is assigned to lands with little vegetation. Thus, an NDVI map provides the possibility of pixel-level assessment of crop health.
The applicability of such system can also be extended for the monitoring and management of other crops (e.g., tomatoes, potatoes, etc.) due to the adaptability of the system and the multiple possibilities of integrating new state-of-the-art technologies in terms of module connectivity components.